联系人:张先生
手 机:18800576288
电 话:0510-81081298
邮 箱:info@tech-real.cn
网 址:www.wxreal-tek.com
地 址:无锡市新吴区天安智慧城A3-401室
GOM三维扫描仪—效率、精度、灵活。可轻松完成尺寸检测,无需贴点灵活方便。
有各种各样的方法来执行自动化、高精度测量,每种方法都有各自的优点。对于测量特定特征(例如孔)来说,接触测量方法更为有/效,它可以确保这些孔处于其应有的位置,且形状和大小准确无误。当需要扫描整个形状,用于对零件进行逆向设计时,光学测量则更为有/效。光学技术可以提供一个完整、详细的表面图像。由于光学扫描图像一次覆盖整个视野而不是一个点,因此可以很快完成扫描。
用三角测量法观察深度和轮廓
识别轮廓时需要判断与固定点的相对距离,但不能仅仅从某个单一角度进行。如果你闭上一只眼睛,就会失去深度的感知力,自然也就无法有/效地判断距离或轮廓。我们人类之所以能够判断深度,是由于我们可以用两只眼睛从不同的角度去观察同一个物体。然后,我们会在心理上使其形成一个三角形,以确定物体表面上每一个点的相对距离,之后通过扩展可以得到其轮廓。
例如,利用CAD模型中创建的“线框”图像也可以看到同样的效果。如果从垂直于表面的角度观察物体,投影在弯曲模型的轮廓表面上的线条可能会呈直线状。但当物体旋转远离直视角度时,这些线条便开始弯曲,显示曲面的轮廓。这就是光学扫描所具有的功能。
红色激光与蓝光扫描
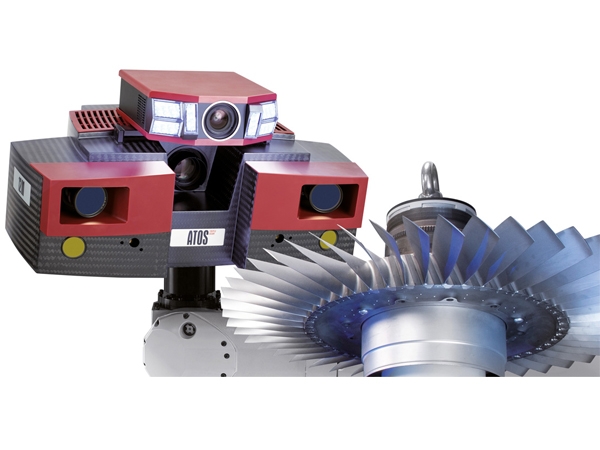
目前有多种技术用于光学扫描,其中主要的两种技术是红色激光扫描和蓝光扫描。红色激光扫描较为简单,通常只需少量培训即可掌握,甚至可以使用手持设备完成。它的缺点在于不太精/确,在反射表面上使用时尤为明显。蓝光的波长较短,适合于许多反射表面,其均匀的频率范围使其比白光更精/确。
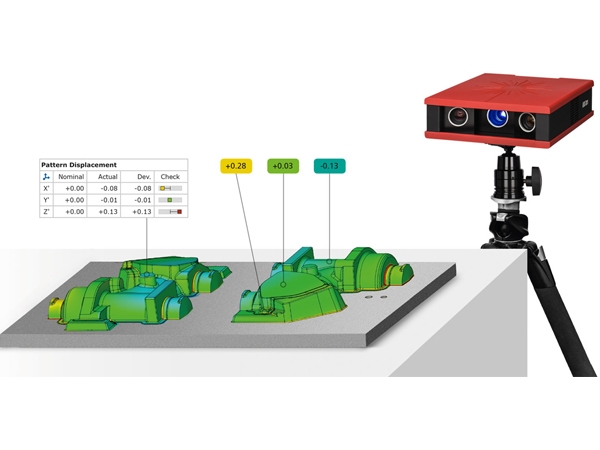
蓝光技术通过三角测量摄影镜头的视线和将“条纹”图案投射到被测表面上的光源的视线来识别轮廓,然后使用软件将多个图像转换成三维表示。这本质上是一个摄影过程,取决于供应商,涉及一种条纹图案投影仪和一两个摄像头。在任一种情况下,使用高精度旋转工作台转动被扫描的物体,即可实现360度全景显示。在某些情况下,经过360度完/全扫描后,转动物体,然后再次通过完/全旋转进行扫描,可获得球形而非圆柱形的视图。
单个与多个摄像头
多个摄像头的问题在于,其视图仅在各自视野重叠的位置才有、效。因此,实际上两个摄像头的视野比单个摄像头还小。如果两个摄像头的目的是形成三角形以用来测量轮廓,那么该功能可以由单镜头设计提供,由单镜头和投影仪进行三角测量。并且因为两个摄像头对目标的视角略有不同,因此得出的测量结果可能没有单个摄像头所产生的单一WYSIWYG图像清晰。
摄像头和投影仪使用可互换镜头来覆盖一系列不同尺寸的视野。这样便可以检查从非常小的零件到整个车辆的任何东西。更换镜头后,以及在其他情况下,要对摄像头进行须重新校准以确保其z高精度。由于显而易见的原因,在单摄像头装置中更换镜头和重新校准比使用双摄像头时更简单。
图像分辨率
扫描图像的分辨率由所选视野和摄像头本身的分辨率共同决定。例如,如果采用视野相同的镜头,1600万像素的摄像头将比500万像素的摄像头具有更高的分辨率。然而,分辨率较低的摄像头可以通过缩小每个图像的视野与分辨率较高的摄像头的图像分辨率相搭配。这就需要大量的图像来创建z终的3D图像,并明显减慢进程。
分辨率较低的摄像头成本较低,如果仅扫描相对较小的物体则胜任。如果没有时间限制,它也能以高分辨率扫描较大的物体。
创建3D图像
蓝光扫描仪的软件可以将多个扫描图像组合成3D表面图像,可以进行存储、旋转、扩展和其他检查,以对零件或组件做出评估。该软件可以创建一个“点云”,即表示扫描对象的一组点。摄像头和视野决定点的密度,这些点实质上代表虚拟对象的像素。软件算法可消/除各图像之间的重叠,以便以STL(立体光刻)形式创建一个无缝数据集。STL文件可用于检测和质量控制、工具和模型制作、逆向工程和快速制造等。
软件使用的难点在于识别多个图像之间的重叠点。在某些系统中,将可见的“目标”放到正在扫描的物体上即可完成识别,就像电影“动作捕捉”系统在一个绿光屏前的演员身上放置可见的目标,然后处理视频图像,即可在演员动作之后的场景中创建一个角色。
同样,光学扫描仪的软件与匹配邻近图像中的目标相匹配,可以将组件图像定位到完整的z终图像中。安装和移除目标需要时间,并且要对目标进行正确定位,以确保所有图像都可以集成到z终图像中。另一种方法是使用能够识别扫描对象本身特征的软件,将其定义为目标,并使用它们来对齐各个图像。这种方法需要使用一些更精密的软件,但它简化了扫描过程,同时确保了z大的精/确度。
无锡天之瑞科技有限公司坐落于太湖之滨,无锡市高新科技产业区。公司主营业务为两大块:为制造型企业提供测量仪器和非标自动化检测解决方案。
公司成立以来,天之瑞以严谨及高.效的态度,协助客户克服检测难点,提高加工检测效率,迅速成为客户值得信赖的合作伙伴!
 公司名称:无锡天之瑞科技有限公司
公司名称:无锡天之瑞科技有限公司
 联系手机:18800576288 张先生
联系手机:18800576288 张先生
 联系电话: 0510-81081298
联系电话: 0510-81081298
 公司邮箱:info@tech-real.cn
公司邮箱:info@tech-real.cn
 公司地址:无锡市新吴区天安智慧城A3-401室
公司地址:无锡市新吴区天安智慧城A3-401室
 关键词:关节臂测量仪,半导体测量,GOM三维扫描仪
关键词:关节臂测量仪,半导体测量,GOM三维扫描仪