联系人:张先生
手 机:18800576288
电 话:0510-81081298
邮 箱:info@tech-real.cn
网 址:www.wxreal-tek.com
地 址:无锡市新吴区天安智慧城A3-401室
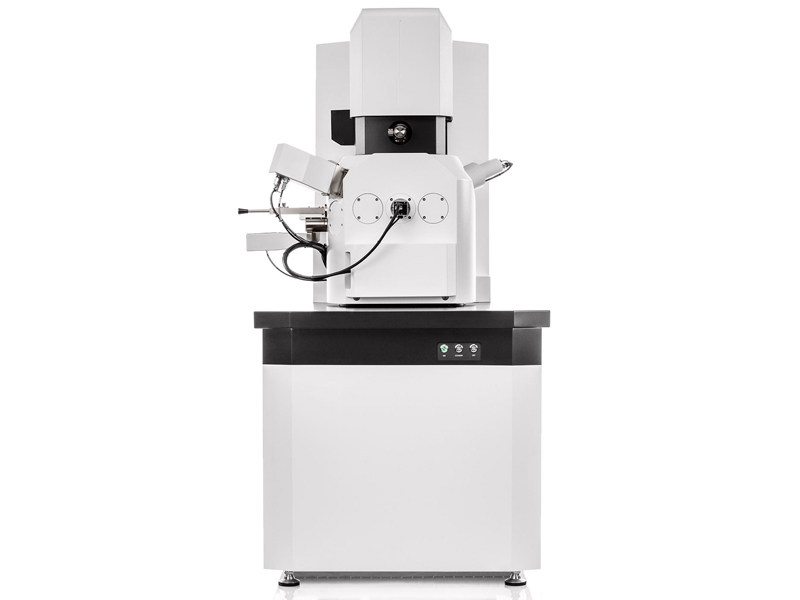
关节臂测量仪的结构组成及工作原理
关节臂测量仪的组成:关节臂测量仪是典型的机电一体化设备,它由机械系统和电子系统两大部分组成。
(1)机械系统:
一般由三个正交的直线运动轴构成。结构中,X向导轨系统装在工作台上,移动桥架横梁是Y向导轨系统,Z向导轨系统装在中央滑架内。三个方向轴上均装有光栅尺用以度量各轴位移值。人工驱动的手轮及机动、数控驱动的电机一般都在各轴附近。用来触测被检测零件表面的测头装在Z轴端部。
(2)电子系统:
一般由光栅计数系统、测头信号接口和计算机等组成,用于获得被测坐标点数据,并对数据进行处理。
关节臂测量仪的工作原理
三坐标测量机是基于坐标测量的通用化数字测量设备。它首先将各被测几何元素的测量转化为对这些几何元素上一些点集坐标位置的测量,在测得这些点的坐标位置后,再根据这些点的空间坐标值,经过数学运算求出其尺寸和形位误差。要测量工件上一圆柱孔的直径,可以在垂直于孔轴线的截面I内,触测内孔壁上三个点(点1、2、3),则根据这三点的坐标值就可计算出孔的直径及圆心坐标OI;如果在该截面内触测更多的点(点1,2,…,n,n为测点数),则可根据最小二乘法或最小条件法计算出该截面圆的圆度误差;
如果对多个垂直于孔轴线的截面圆(I,II,…,m,m为测量的截面圆数)进行测量,则根据测得点的坐标值可计算出孔的圆柱度误差以及各截面圆的圆心坐标,再根据各圆心坐标值又可计算出孔轴线位置;如果再在孔端面A上触测三点,则可计算出孔轴线对端面的位置度误差。由此可见,关节臂测量仪的这一工作原理使得其具有很大的通用性与柔性。从原理上说,它可以测量任何工件的任何几何元素的任何参数。

 公司名称:无锡天之瑞科技有限公司
公司名称:无锡天之瑞科技有限公司
 联系手机:18800576288 张先生
联系手机:18800576288 张先生
 联系电话: 0510-81081298
联系电话: 0510-81081298
 公司邮箱:info@tech-real.cn
公司邮箱:info@tech-real.cn
 公司地址:无锡市新吴区天安智慧城A3-401室
公司地址:无锡市新吴区天安智慧城A3-401室
 关键词:关节臂测量仪,半导体测量,GOM三维扫描仪
关键词:关节臂测量仪,半导体测量,GOM三维扫描仪